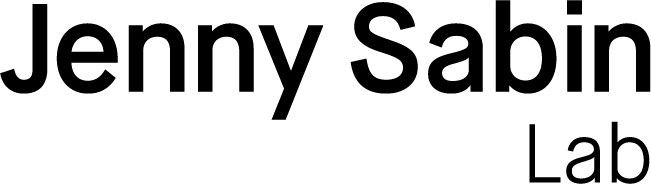
RoboSense 2.0
A Project by Jenny Sabin Lab
Cornell University








Abstract
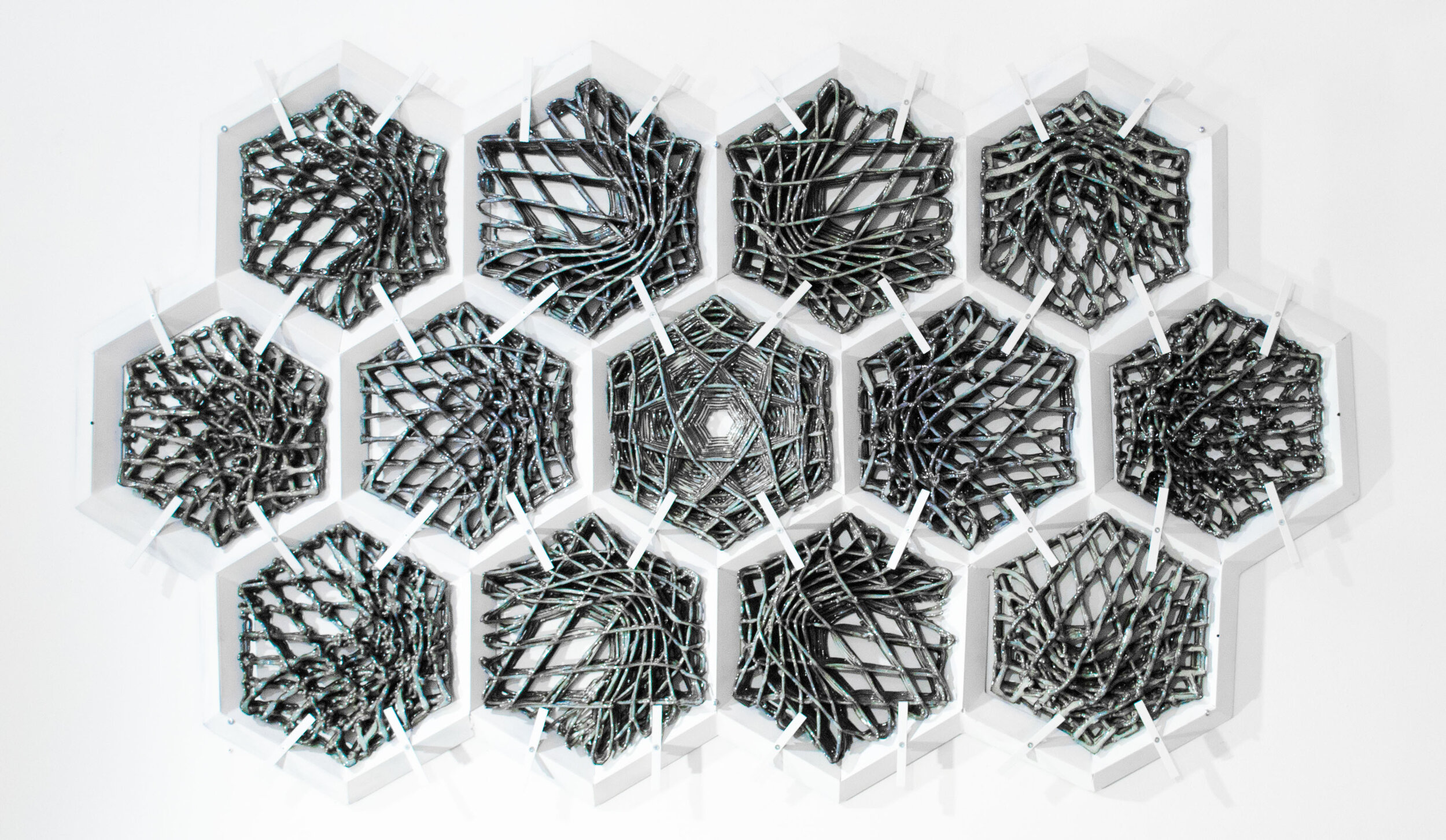
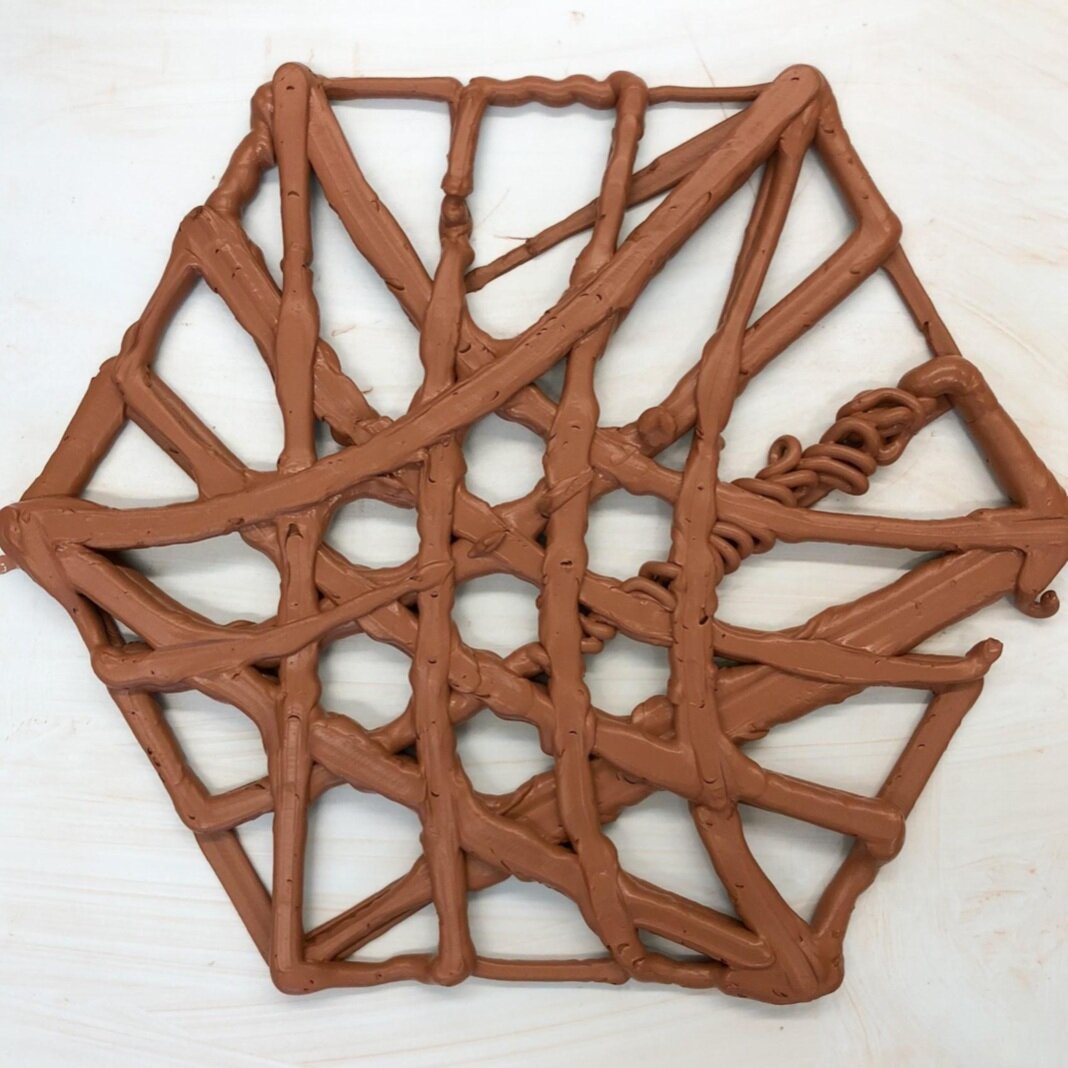
Robosense 2.0: Robotic Sensing and Architectural Ceramic Fabrication” demonstrates a generative design process based on collaboration between designers, robotic tools, advanced software, and nuanced material behavior. The project employs fabrication tools that are typically used in highly precise and predetermined applications, but uniquely thematizes the unpredictable aspects of these processes as applied to architectural component design. By integrating responsive sensing systems, this paper demonstrates real-time feedback loops that consider the spontaneous agency and intuition of the architect (or craftsperson) rather than the execution of static or predetermined designs. This paper includes new developments in robotics software for architectural design applications, ceramic-deposition 3D printing, sensing systems, materially driven pattern design, and techniques with roots in the arts and crafts. Considering the increasing accessibility and advancement of 3D printing and robotic technologies, this project seeks to challenge the erasure of materiality: when mistakes or accidents caused by inconsistencies in natural material are avoided or intentionally hidden. Instead, the incorporation of material and user-input data yields designs that are imbued with more nuanced traces of making. This paper suggests the potential for architects and craftspeople to maintain a more direct and active relationship with the production of their designs.