RoboSense 1.0
A Project by Jenny Sabin Lab
Cornell University



Abstract
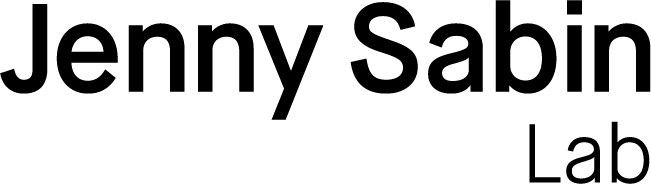
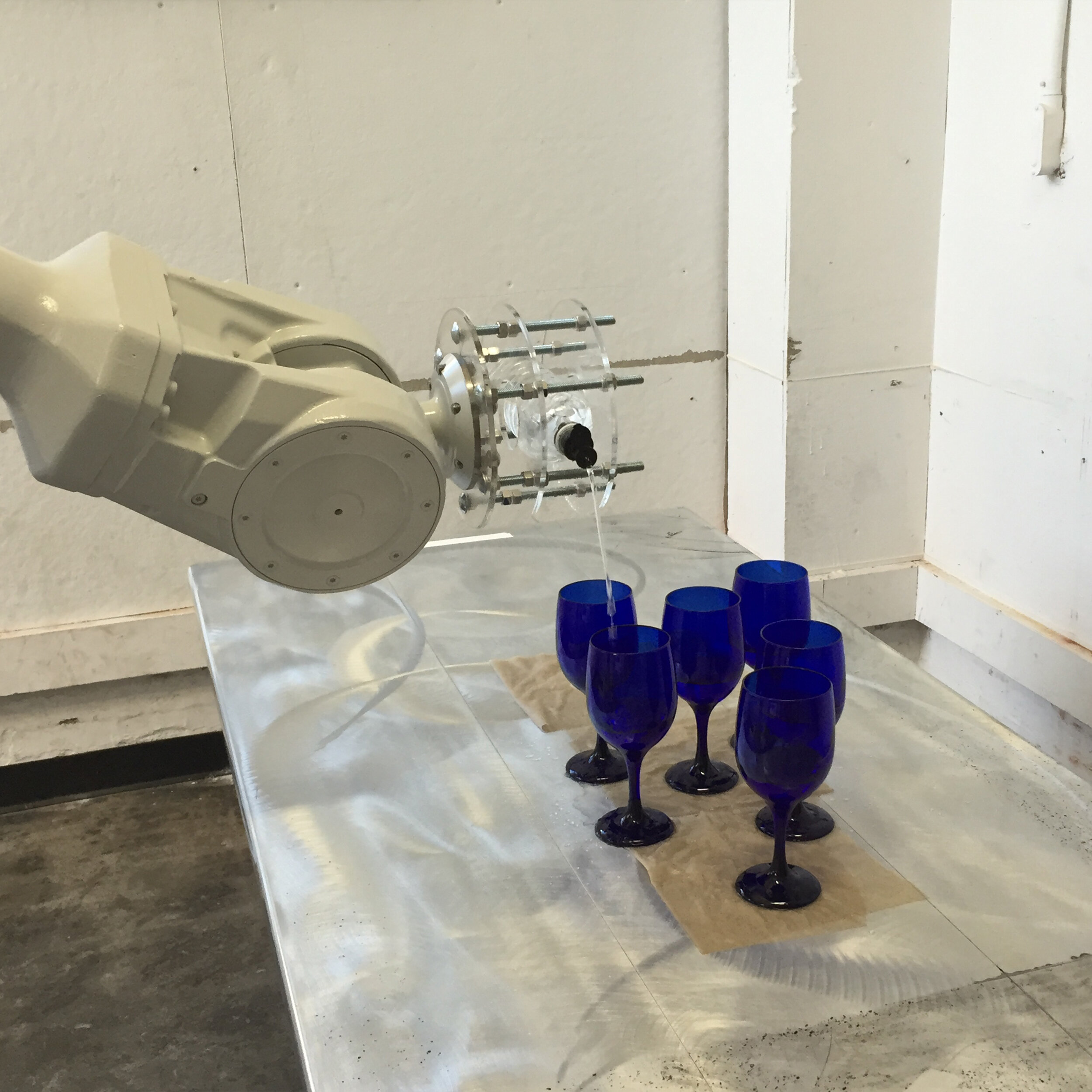
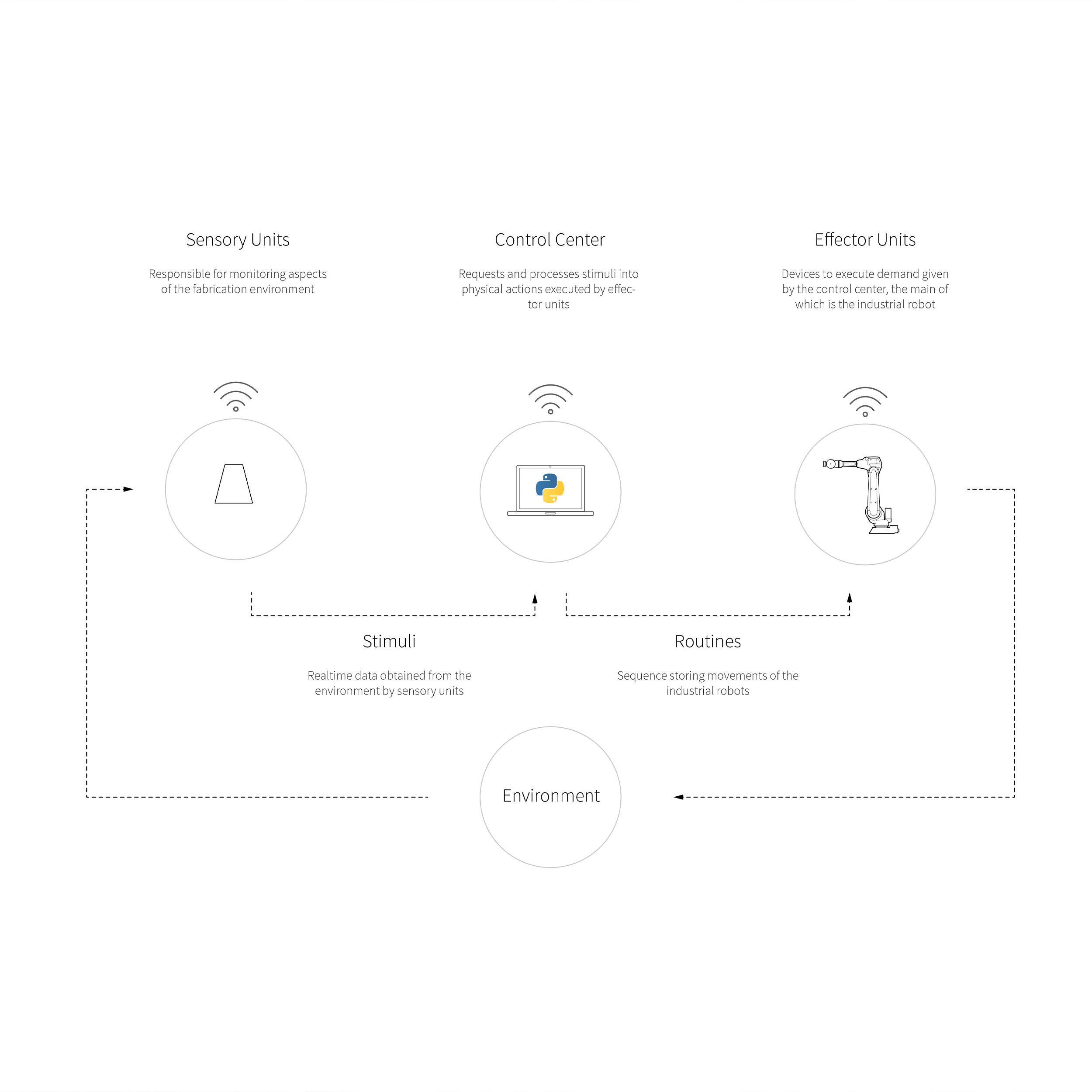
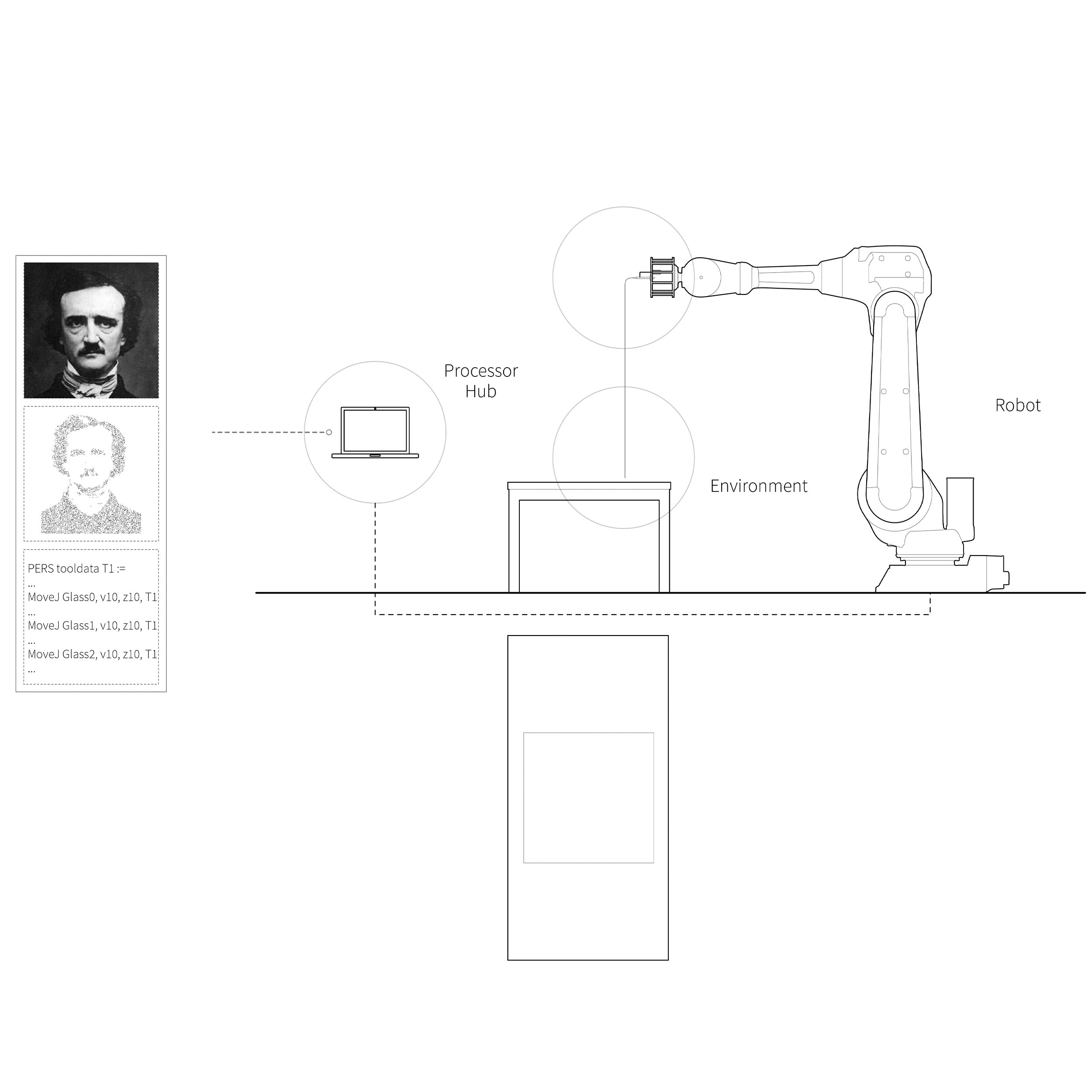
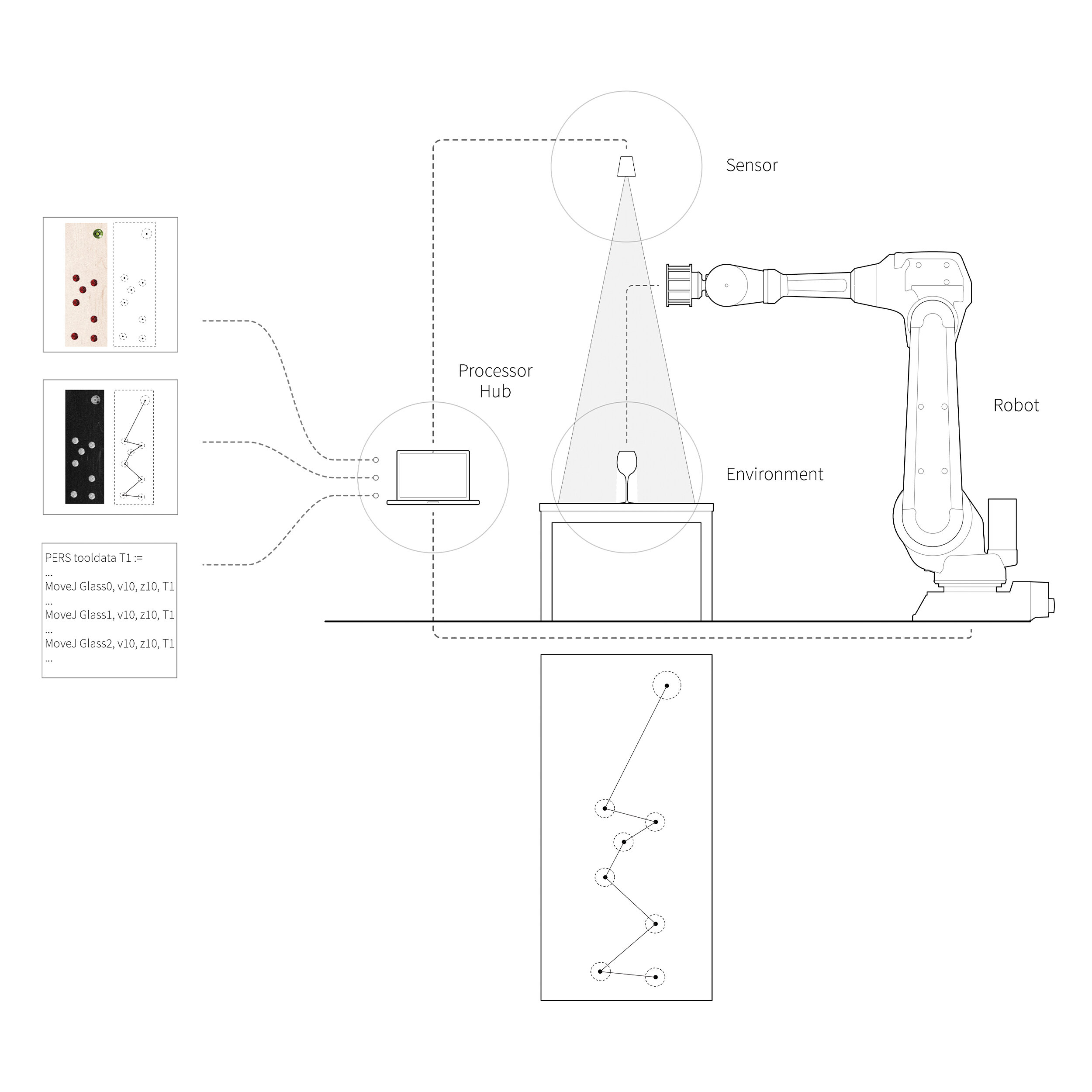
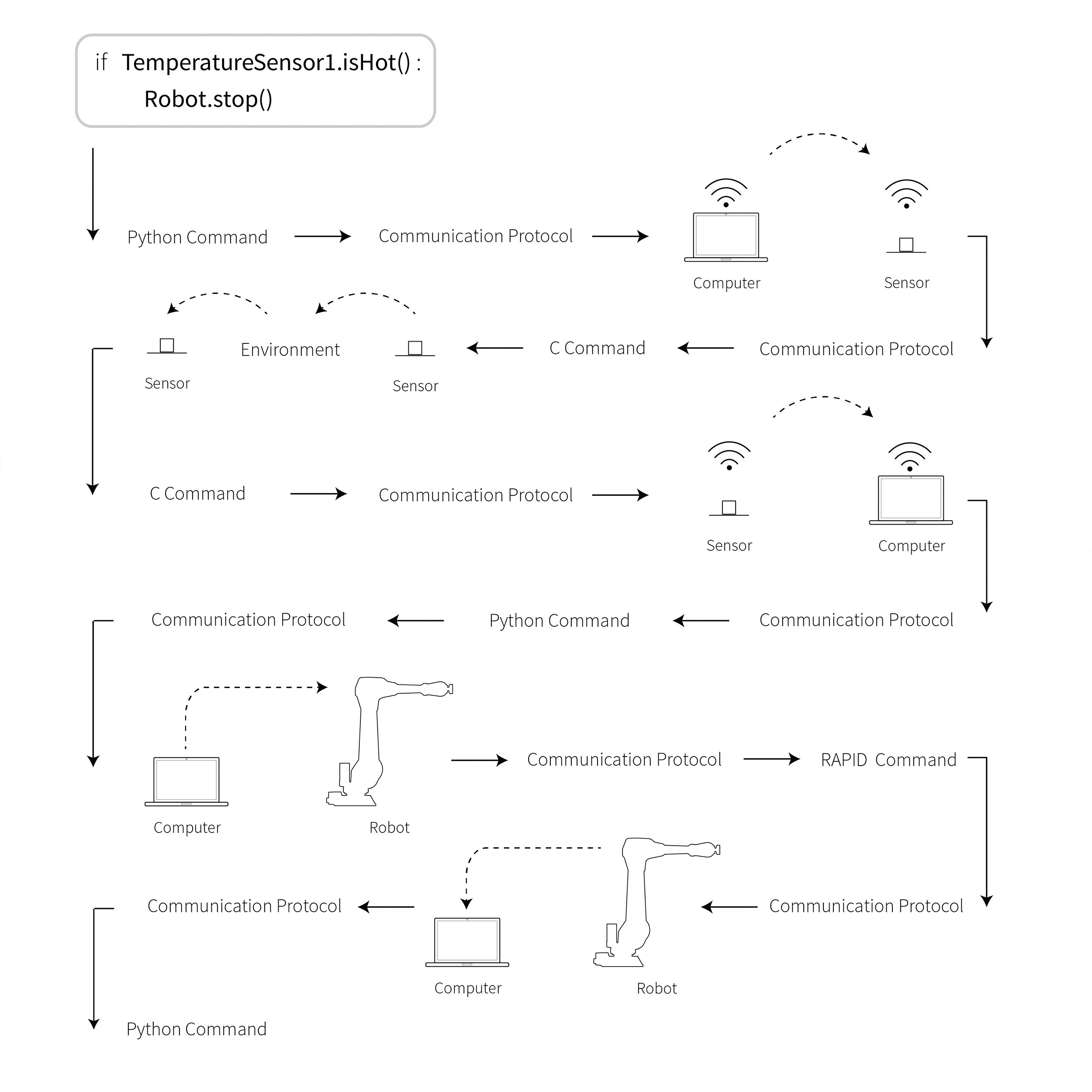
While nonlinear concepts are widely applied in analysis and generative design in architecture, they have not yet convincingly translated into the material realm of fabrication and construction. As the gap between digital design model, shop drawing, and fabricated result continues to diminish, we seek to learn from fabrication models and natural systems that do not separate code, geometry, pattern, material compliance, communication, and form, but rather operate within dynamic loops of feedback, reciprocity, and generative fabrication. Three distinct, but connected problems: 1) Robotic ink drawing; 2) Robotic wine pouring and object detection; and 3) Dynamically Adjusted Extrusion; were addressed to develop a toolkit including software, custom digital design tools, and hardware for robotic fabrication and user interaction in cyber-physical contexts. Our primary aim is to simplify and consolidate the multiple platforms necessary to construct feedback networks for robotic fabrication into a central and intuitive programming environment for both the advanced to novice user. Our experimentation in prototyping feedback networks for use with robotics in design practice suggests that the application of this knowledge often follows a remarkably consistent profile. By exploiting these redundancies, we developed a support toolkit of data structures and routines that provide simple integrated software for the user-friendly programming of commonly used roles and functionalities in dynamic robotic fabrication, thus promoting a methodology of feedback-oriented design processes